projects
A growing collection of your cool projects.
work
projects
For more projects, please visit my Github</b>
 | [Research Project] @ RVL. With Yewon L., Pranit C. Investigated how unsupervised representation learning could be utilized in an imitation learning (IL) task such as robot path following. In this project, we successfully trained a multimodal representation from unlabelled path traversal data, fine-tuned on minimal labeled data. |
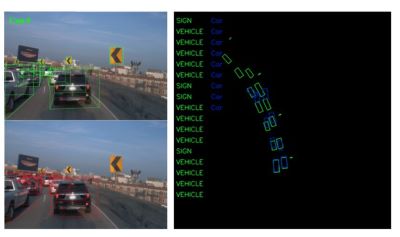 | [Research Presentation] @ TRAILab, funded by NSERC USRA Code Designed and executed an analysis of effect of camera perspectives on object detection networks, identifying limitations of multi-view self-driving datasets and current state-of-art monocular networks. The performance of trained monocular networks on various views of multiview dataset was analyzed with respect to multiple factors including distance, rotation and level of occlusion. |
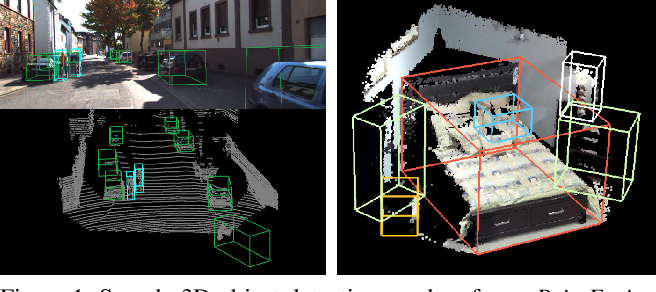 | [Research Project] @ RVL, funded by ESROP Dr Allison Mackay Award Code Led the implementation of multi-sensor object detection neural networks to state-of-art performance using PyTorch for an adversarial examples project, to improve robustness of image and lidar perception models. Trained fasterRCNN on nuScenes self driving car dataset and implemented Pointfusion architecture based on the original paper. |
 | [Competition] University/European/Canadian Rover Challenges Code Spearheaded development of rover drive control software pipeline which includes joystick integration, configuration of I2C protocol for motor drivers, variable speed control and AR tag detection. Languages used were Python, C++ and ROS was utilized to handle communication between topics. |
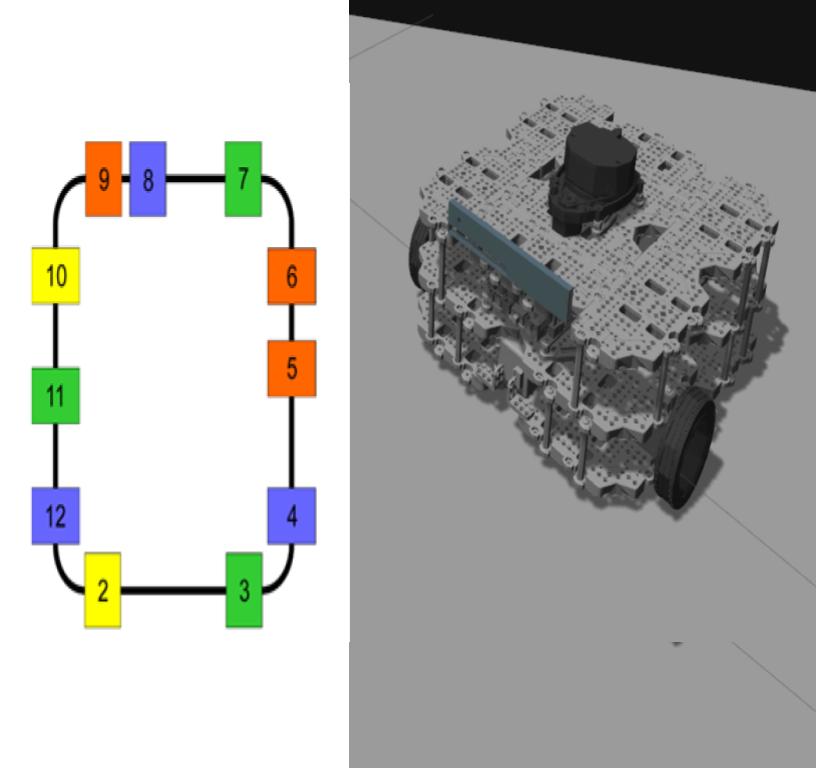 | [Final Project], University of Toronto, ROB301 Introduction to Robotics. With Samantha U. Detailed Report / Code Coming Soon A PID control system, bayesian localization and state measurement models were developed in order to enable the robot to navigate an unknown hallway to deliver mail at specified destinations. The project was completed virtually using the Turtlebot 3 Waffle Pi robot simulated in a Gazebo environment. |
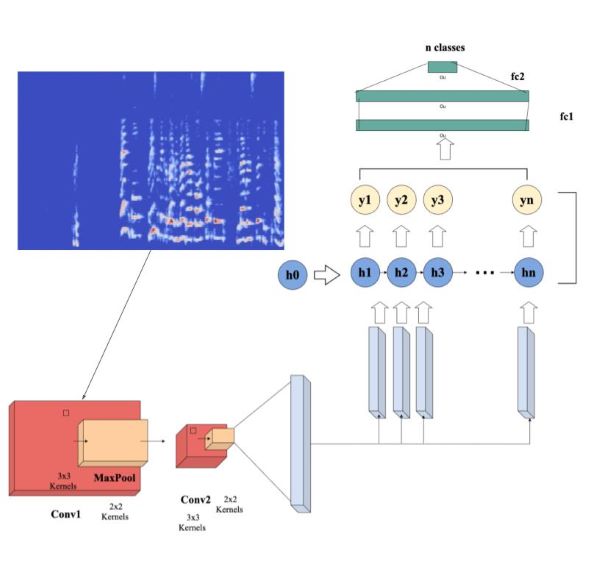 | [Final Project], University of Toronto, APS360 Applied Fundamentals of Machine Learning. With Mingshi C., Catherine G., Rocco R. Detailed Report / Code Coming Soon Motivated by challenges experienced with voice-controlled devices, our team developed a neural network speech accent classifier which takes an accented English phrase as input and correctly identifies the origin of that speaker’s accent. The network developed was a CRNN architecture with mixed convolutional and recurrent neural network layers which learned both temporal and characteristic features of the audio data. The audio was processed into Mel-frequency cepstral coefficients (MFCC) features for input. |
 | [Final Project], University of Toronto, ESC301 Praxis III. With Daniel R. and Chan Y. Detailed Design Report Designed, conceptualized and prototyped an autonomous robot which locates and traverses to a charging port on a car to plug in the charger, utilizing time-of-flight sensor, color sensor, and pi-camera. Developed a modular program in Python and C++, each responsible for sensor or chassis control; utilized embedded programing |
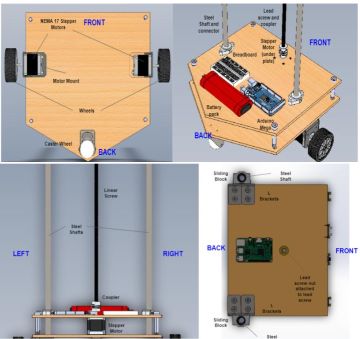
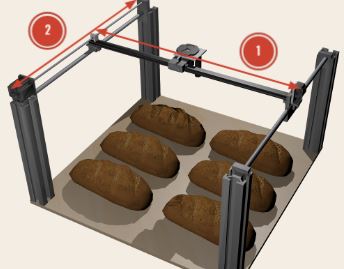 | [Final Project], University of Toronto, ESC102 Praxis II. With Mingshi C., Daniela L., Peter S. Poster / Demo Video Designed a fully automated robotics system to inform sourdough bakers when their dough is ready to be put into the oven, in collaboration with local Toronto bakers at Forno Cultura and Blackbird Bakeries. The system develops a custom yeast-growth model and while the dough is expanding, the robot uses a 2 axis linear stage, time of flight sensor and temperature sensor to track the dough growth and alerts the bakers when it is ready. |
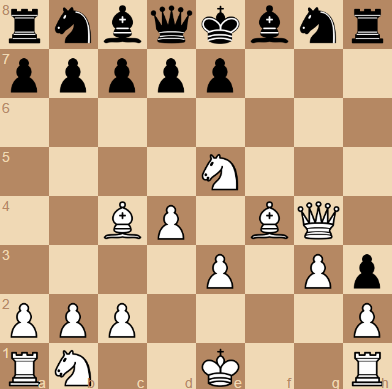 | [Class Project], University of Toronto, CSC190 Algorithms and Data Structures. Code Developed an automatic chess player that while utilizes alpha-beta pruning on a min-max game tree in order to select the best move against a human opponent. |
 | [Final Project], University of Toronto, MIE438 Microcontrollers and Embedded Processors. Code / Demo Video Bit’s Adventure is an original interactive RPG for the Original Game Boy which was coded using gbdk package in C. The game can be played on Game Boy emulators such as mGBA. |
projects
For more projects, please visit my Github</b>
| | [Research Project] @ RVL. With Yewon L., Pranit C. Investigated how unsupervised representation learning could be utilized in an imitation learning (IL) task such as robot path following. In this project, we successfully trained a multimodal representation from unlabelled path traversal data, fine-tuned on minimal labeled data. |
| | [Research Presentation] @ TRAILab, funded by NSERC USRA Code Designed and executed an analysis of effect of camera perspectives on object detection networks, identifying limitations of multi-view self-driving datasets and current state-of-art monocular networks. The performance of trained monocular networks on various views of multiview dataset was analyzed with respect to multiple factors including distance, rotation and level of occlusion. |
| | [Research Project] @ RVL, funded by ESROP Dr Allison Mackay Award Code Led the implementation of multi-sensor object detection neural networks to state-of-art performance using PyTorch for an adversarial examples project, to improve robustness of image and lidar perception models. Trained fasterRCNN on nuScenes self driving car dataset and implemented Pointfusion architecture based on the original paper. |
| | [Competition] University/European/Canadian Rover Challenges Code Spearheaded development of rover drive control software pipeline which includes joystick integration, configuration of I2C protocol for motor drivers, variable speed control and AR tag detection. Languages used were Python, C++ and ROS was utilized to handle communication between topics. |
| | [Final Project], University of Toronto, ROB301 Introduction to Robotics. With Samantha U. Detailed Report / Code Coming Soon A PID control system, bayesian localization and state measurement models were developed in order to enable the robot to navigate an unknown hallway to deliver mail at specified destinations. The project was completed virtually using the Turtlebot 3 Waffle Pi robot simulated in a Gazebo environment. |
| | [Final Project], University of Toronto, APS360 Applied Fundamentals of Machine Learning. With Mingshi C., Catherine G., Rocco R. Detailed Report / Code Coming Soon Motivated by challenges experienced with voice-controlled devices, our team developed a neural network speech accent classifier which takes an accented English phrase as input and correctly identifies the origin of that speaker’s accent. The network developed was a CRNN architecture with mixed convolutional and recurrent neural network layers which learned both temporal and characteristic features of the audio data. The audio was processed into Mel-frequency cepstral coefficients (MFCC) features for input. |
| | [Final Project], University of Toronto, ESC301 Praxis III. With Daniel R. and Chan Y. Detailed Design Report Designed, conceptualized and prototyped an autonomous robot which locates and traverses to a charging port on a car to plug in the charger, utilizing time-of-flight sensor, color sensor, and pi-camera. Developed a modular program in Python and C++, each responsible for sensor or chassis control; utilized embedded programing |
| | [Final Project], University of Toronto, ESC102 Praxis II. With Mingshi C., Daniela L., Peter S. Poster / Demo Video Designed a fully automated robotics system to inform sourdough bakers when their dough is ready to be put into the oven, in collaboration with local Toronto bakers at Forno Cultura and Blackbird Bakeries. The system develops a custom yeast-growth model and while the dough is expanding, the robot uses a 2 axis linear stage, time of flight sensor and temperature sensor to track the dough growth and alerts the bakers when it is ready. |
| | [Class Project], University of Toronto, CSC190 Algorithms and Data Structures. Code Developed an automatic chess player that while utilizes alpha-beta pruning on a min-max game tree in order to select the best move against a human opponent. |
| | [Final Project], University of Toronto, MIE438 Microcontrollers and Embedded Processors. Code / Demo Video Bit’s Adventure is an original interactive RPG for the Original Game Boy which was coded using gbdk package in C. The game can be played on Game Boy emulators such as mGBA. |
projects
For more projects, please visit my Github</b>
| | [Research Project] @ RVL. With Yewon L., Pranit C. Investigated how unsupervised representation learning could be utilized in an imitation learning (IL) task such as robot path following. In this project, we successfully trained a multimodal representation from unlabelled path traversal data, fine-tuned on minimal labeled data. |
| | [Research Presentation] @ TRAILab, funded by NSERC USRA Code Designed and executed an analysis of effect of camera perspectives on object detection networks, identifying limitations of multi-view self-driving datasets and current state-of-art monocular networks. The performance of trained monocular networks on various views of multiview dataset was analyzed with respect to multiple factors including distance, rotation and level of occlusion. |
| | [Research Project] @ RVL, funded by ESROP Dr Allison Mackay Award Code Led the implementation of multi-sensor object detection neural networks to state-of-art performance using PyTorch for an adversarial examples project, to improve robustness of image and lidar perception models. Trained fasterRCNN on nuScenes self driving car dataset and implemented Pointfusion architecture based on the original paper. |
| | [Competition] University/European/Canadian Rover Challenges Code Spearheaded development of rover drive control software pipeline which includes joystick integration, configuration of I2C protocol for motor drivers, variable speed control and AR tag detection. Languages used were Python, C++ and ROS was utilized to handle communication between topics. |
| | [Final Project], University of Toronto, ROB301 Introduction to Robotics. With Samantha U. Detailed Report / Code Coming Soon A PID control system, bayesian localization and state measurement models were developed in order to enable the robot to navigate an unknown hallway to deliver mail at specified destinations. The project was completed virtually using the Turtlebot 3 Waffle Pi robot simulated in a Gazebo environment. |
| | [Final Project], University of Toronto, APS360 Applied Fundamentals of Machine Learning. With Mingshi C., Catherine G., Rocco R. Detailed Report / Code Coming Soon Motivated by challenges experienced with voice-controlled devices, our team developed a neural network speech accent classifier which takes an accented English phrase as input and correctly identifies the origin of that speaker’s accent. The network developed was a CRNN architecture with mixed convolutional and recurrent neural network layers which learned both temporal and characteristic features of the audio data. The audio was processed into Mel-frequency cepstral coefficients (MFCC) features for input. |
| | [Final Project], University of Toronto, ESC301 Praxis III. With Daniel R. and Chan Y. Detailed Design Report Designed, conceptualized and prototyped an autonomous robot which locates and traverses to a charging port on a car to plug in the charger, utilizing time-of-flight sensor, color sensor, and pi-camera. Developed a modular program in Python and C++, each responsible for sensor or chassis control; utilized embedded programing |
| | [Final Project], University of Toronto, ESC102 Praxis II. With Mingshi C., Daniela L., Peter S. Poster / Demo Video Designed a fully automated robotics system to inform sourdough bakers when their dough is ready to be put into the oven, in collaboration with local Toronto bakers at Forno Cultura and Blackbird Bakeries. The system develops a custom yeast-growth model and while the dough is expanding, the robot uses a 2 axis linear stage, time of flight sensor and temperature sensor to track the dough growth and alerts the bakers when it is ready. |
| | [Class Project], University of Toronto, CSC190 Algorithms and Data Structures. Code Developed an automatic chess player that while utilizes alpha-beta pruning on a min-max game tree in order to select the best move against a human opponent. |
| | [Final Project], University of Toronto, MIE438 Microcontrollers and Embedded Processors. Code / Demo Video Bit’s Adventure is an original interactive RPG for the Original Game Boy which was coded using gbdk package in C. The game can be played on Game Boy emulators such as mGBA. |
fun
projects
For more projects, please visit my Github</b>
| | [Research Project] @ RVL. With Yewon L., Pranit C. Investigated how unsupervised representation learning could be utilized in an imitation learning (IL) task such as robot path following. In this project, we successfully trained a multimodal representation from unlabelled path traversal data, fine-tuned on minimal labeled data. |
| | [Research Presentation] @ TRAILab, funded by NSERC USRA Code Designed and executed an analysis of effect of camera perspectives on object detection networks, identifying limitations of multi-view self-driving datasets and current state-of-art monocular networks. The performance of trained monocular networks on various views of multiview dataset was analyzed with respect to multiple factors including distance, rotation and level of occlusion. |
| | [Research Project] @ RVL, funded by ESROP Dr Allison Mackay Award Code Led the implementation of multi-sensor object detection neural networks to state-of-art performance using PyTorch for an adversarial examples project, to improve robustness of image and lidar perception models. Trained fasterRCNN on nuScenes self driving car dataset and implemented Pointfusion architecture based on the original paper. |
| | [Competition] University/European/Canadian Rover Challenges Code Spearheaded development of rover drive control software pipeline which includes joystick integration, configuration of I2C protocol for motor drivers, variable speed control and AR tag detection. Languages used were Python, C++ and ROS was utilized to handle communication between topics. |
| | [Final Project], University of Toronto, ROB301 Introduction to Robotics. With Samantha U. Detailed Report / Code Coming Soon A PID control system, bayesian localization and state measurement models were developed in order to enable the robot to navigate an unknown hallway to deliver mail at specified destinations. The project was completed virtually using the Turtlebot 3 Waffle Pi robot simulated in a Gazebo environment. |
| | [Final Project], University of Toronto, APS360 Applied Fundamentals of Machine Learning. With Mingshi C., Catherine G., Rocco R. Detailed Report / Code Coming Soon Motivated by challenges experienced with voice-controlled devices, our team developed a neural network speech accent classifier which takes an accented English phrase as input and correctly identifies the origin of that speaker’s accent. The network developed was a CRNN architecture with mixed convolutional and recurrent neural network layers which learned both temporal and characteristic features of the audio data. The audio was processed into Mel-frequency cepstral coefficients (MFCC) features for input. |
| | [Final Project], University of Toronto, ESC301 Praxis III. With Daniel R. and Chan Y. Detailed Design Report Designed, conceptualized and prototyped an autonomous robot which locates and traverses to a charging port on a car to plug in the charger, utilizing time-of-flight sensor, color sensor, and pi-camera. Developed a modular program in Python and C++, each responsible for sensor or chassis control; utilized embedded programing |
| | [Final Project], University of Toronto, ESC102 Praxis II. With Mingshi C., Daniela L., Peter S. Poster / Demo Video Designed a fully automated robotics system to inform sourdough bakers when their dough is ready to be put into the oven, in collaboration with local Toronto bakers at Forno Cultura and Blackbird Bakeries. The system develops a custom yeast-growth model and while the dough is expanding, the robot uses a 2 axis linear stage, time of flight sensor and temperature sensor to track the dough growth and alerts the bakers when it is ready. |
| | [Class Project], University of Toronto, CSC190 Algorithms and Data Structures. Code Developed an automatic chess player that while utilizes alpha-beta pruning on a min-max game tree in order to select the best move against a human opponent. |
| | [Final Project], University of Toronto, MIE438 Microcontrollers and Embedded Processors. Code / Demo Video Bit’s Adventure is an original interactive RPG for the Original Game Boy which was coded using gbdk package in C. The game can be played on Game Boy emulators such as mGBA. |
projects
For more projects, please visit my Github</b>
| | [Research Project] @ RVL. With Yewon L., Pranit C. Investigated how unsupervised representation learning could be utilized in an imitation learning (IL) task such as robot path following. In this project, we successfully trained a multimodal representation from unlabelled path traversal data, fine-tuned on minimal labeled data. |
| | [Research Presentation] @ TRAILab, funded by NSERC USRA Code Designed and executed an analysis of effect of camera perspectives on object detection networks, identifying limitations of multi-view self-driving datasets and current state-of-art monocular networks. The performance of trained monocular networks on various views of multiview dataset was analyzed with respect to multiple factors including distance, rotation and level of occlusion. |
| | [Research Project] @ RVL, funded by ESROP Dr Allison Mackay Award Code Led the implementation of multi-sensor object detection neural networks to state-of-art performance using PyTorch for an adversarial examples project, to improve robustness of image and lidar perception models. Trained fasterRCNN on nuScenes self driving car dataset and implemented Pointfusion architecture based on the original paper. |
| | [Competition] University/European/Canadian Rover Challenges Code Spearheaded development of rover drive control software pipeline which includes joystick integration, configuration of I2C protocol for motor drivers, variable speed control and AR tag detection. Languages used were Python, C++ and ROS was utilized to handle communication between topics. |
| | [Final Project], University of Toronto, ROB301 Introduction to Robotics. With Samantha U. Detailed Report / Code Coming Soon A PID control system, bayesian localization and state measurement models were developed in order to enable the robot to navigate an unknown hallway to deliver mail at specified destinations. The project was completed virtually using the Turtlebot 3 Waffle Pi robot simulated in a Gazebo environment. |
| | [Final Project], University of Toronto, APS360 Applied Fundamentals of Machine Learning. With Mingshi C., Catherine G., Rocco R. Detailed Report / Code Coming Soon Motivated by challenges experienced with voice-controlled devices, our team developed a neural network speech accent classifier which takes an accented English phrase as input and correctly identifies the origin of that speaker’s accent. The network developed was a CRNN architecture with mixed convolutional and recurrent neural network layers which learned both temporal and characteristic features of the audio data. The audio was processed into Mel-frequency cepstral coefficients (MFCC) features for input. |
| | [Final Project], University of Toronto, ESC301 Praxis III. With Daniel R. and Chan Y. Detailed Design Report Designed, conceptualized and prototyped an autonomous robot which locates and traverses to a charging port on a car to plug in the charger, utilizing time-of-flight sensor, color sensor, and pi-camera. Developed a modular program in Python and C++, each responsible for sensor or chassis control; utilized embedded programing |
| | [Final Project], University of Toronto, ESC102 Praxis II. With Mingshi C., Daniela L., Peter S. Poster / Demo Video Designed a fully automated robotics system to inform sourdough bakers when their dough is ready to be put into the oven, in collaboration with local Toronto bakers at Forno Cultura and Blackbird Bakeries. The system develops a custom yeast-growth model and while the dough is expanding, the robot uses a 2 axis linear stage, time of flight sensor and temperature sensor to track the dough growth and alerts the bakers when it is ready. |
| | [Class Project], University of Toronto, CSC190 Algorithms and Data Structures. Code Developed an automatic chess player that while utilizes alpha-beta pruning on a min-max game tree in order to select the best move against a human opponent. |
| | [Final Project], University of Toronto, MIE438 Microcontrollers and Embedded Processors. Code / Demo Video Bit’s Adventure is an original interactive RPG for the Original Game Boy which was coded using gbdk package in C. The game can be played on Game Boy emulators such as mGBA. |
projects
For more projects, please visit my Github</b>
| | [Research Project] @ RVL. With Yewon L., Pranit C. Investigated how unsupervised representation learning could be utilized in an imitation learning (IL) task such as robot path following. In this project, we successfully trained a multimodal representation from unlabelled path traversal data, fine-tuned on minimal labeled data. |
| | [Research Presentation] @ TRAILab, funded by NSERC USRA Code Designed and executed an analysis of effect of camera perspectives on object detection networks, identifying limitations of multi-view self-driving datasets and current state-of-art monocular networks. The performance of trained monocular networks on various views of multiview dataset was analyzed with respect to multiple factors including distance, rotation and level of occlusion. |
| | [Research Project] @ RVL, funded by ESROP Dr Allison Mackay Award Code Led the implementation of multi-sensor object detection neural networks to state-of-art performance using PyTorch for an adversarial examples project, to improve robustness of image and lidar perception models. Trained fasterRCNN on nuScenes self driving car dataset and implemented Pointfusion architecture based on the original paper. |
| | [Competition] University/European/Canadian Rover Challenges Code Spearheaded development of rover drive control software pipeline which includes joystick integration, configuration of I2C protocol for motor drivers, variable speed control and AR tag detection. Languages used were Python, C++ and ROS was utilized to handle communication between topics. |
| | [Final Project], University of Toronto, ROB301 Introduction to Robotics. With Samantha U. Detailed Report / Code Coming Soon A PID control system, bayesian localization and state measurement models were developed in order to enable the robot to navigate an unknown hallway to deliver mail at specified destinations. The project was completed virtually using the Turtlebot 3 Waffle Pi robot simulated in a Gazebo environment. |
| | [Final Project], University of Toronto, APS360 Applied Fundamentals of Machine Learning. With Mingshi C., Catherine G., Rocco R. Detailed Report / Code Coming Soon Motivated by challenges experienced with voice-controlled devices, our team developed a neural network speech accent classifier which takes an accented English phrase as input and correctly identifies the origin of that speaker’s accent. The network developed was a CRNN architecture with mixed convolutional and recurrent neural network layers which learned both temporal and characteristic features of the audio data. The audio was processed into Mel-frequency cepstral coefficients (MFCC) features for input. |
| | [Final Project], University of Toronto, ESC301 Praxis III. With Daniel R. and Chan Y. Detailed Design Report Designed, conceptualized and prototyped an autonomous robot which locates and traverses to a charging port on a car to plug in the charger, utilizing time-of-flight sensor, color sensor, and pi-camera. Developed a modular program in Python and C++, each responsible for sensor or chassis control; utilized embedded programing |
| | [Final Project], University of Toronto, ESC102 Praxis II. With Mingshi C., Daniela L., Peter S. Poster / Demo Video Designed a fully automated robotics system to inform sourdough bakers when their dough is ready to be put into the oven, in collaboration with local Toronto bakers at Forno Cultura and Blackbird Bakeries. The system develops a custom yeast-growth model and while the dough is expanding, the robot uses a 2 axis linear stage, time of flight sensor and temperature sensor to track the dough growth and alerts the bakers when it is ready. |
| | [Class Project], University of Toronto, CSC190 Algorithms and Data Structures. Code Developed an automatic chess player that while utilizes alpha-beta pruning on a min-max game tree in order to select the best move against a human opponent. |
| | [Final Project], University of Toronto, MIE438 Microcontrollers and Embedded Processors. Code / Demo Video Bit’s Adventure is an original interactive RPG for the Original Game Boy which was coded using gbdk package in C. The game can be played on Game Boy emulators such as mGBA. |